
We’re used to feel haptic feedback in basic use cases in our electronic devices. Your smartphone is probably the device with which you receive the most tactile notifications since it vibrates every time you receive a phone call, a text message or an email.

While those basic applications are useful, haptic developers are aiming a much higher level of performance for the future of human-machine interface. The ultimate goal in the haptic industry is to be able to replicate texture patterns on electronic devices. Imagine being able to feel the grain of sand of your last vacation pictures on your phone screen. Or feeling the texture of the t-shirt fabric you are currently shopping on the web through your tablet screen. Sounds futuristic, right?
While this technology seems far-fetched, a few companies around the world already released convincing proof of concepts of this technology. You may wonder how it’s even possible to recreate texture on a glass screen with haptics. Let’s see the basics on how a simple vibrating mechanism can recreate complex textures.
Somatosensory System: Mechanisms Behind the Human Touch Sense
The first thing we need to understand is how the human body touch sense works. We’ll cover the basics, since we are no experts on the matter and we only need to understand the fundamentals to see how haptics can trick our minds.
The touch system in the human body is called the somatosensory system. This system is composed of receptors and nerve endings and can sense multiple sensations like temperature, pain and textures, for example. Therefore, there are different kinds of receptors in order to feel those sensations: mechanoreceptors, thermoreceptors, pain receptors and proprioceptors. The interesting receptors for haptics, and particularly to sense and feel textures, are the mechanoreceptors. The human body has four different types of mechanoreceptors: Merkel’s disks, Meissner’s corpuscle, Ruffini endings and Pacinian corpuscles[1].
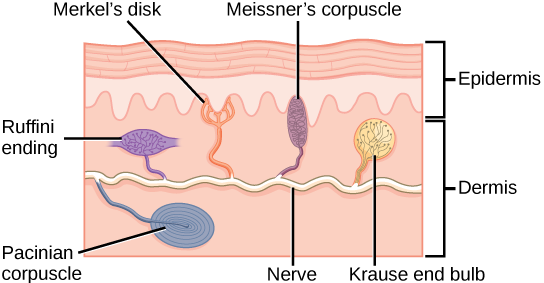
Image source: Somatosensory Receptors - Lumen Learning
Merkels’s disks: Those receptors are mainly situated in the base of epidermis of the skin and are responsible for light touch sensing.
Meissner’s corpuscle: They are situated in the upper dermis and are responsible for sensing fine details.
Ruffini endings: They are situated in the dermis and are responsible for proprioception, kinesthesia and detecting warmth.
Pacinian corpuscles: They are situated in the dermis and are responsible for to sense deep pressure and high-frequency vibration.
These receptors are the reason why the human body can feel through touch. They can perceive vibrations, pressure and texture. How? They convert the vibration they sense into waveforms!
The nervous system then transfers the waveforms generated by the skin mechanoreceptors to the brain. This is where the magic occurs. Your brain can transform the waveforms into actual sensations. Using the frequency patterns and timing of the waveforms, the brain can know that you are touching a given texture.
Now that you understand how the somatosensory system works, it sounds a lot like how a haptic solution works!
Haptic Textures Can be Simplified to Vibration Patterns
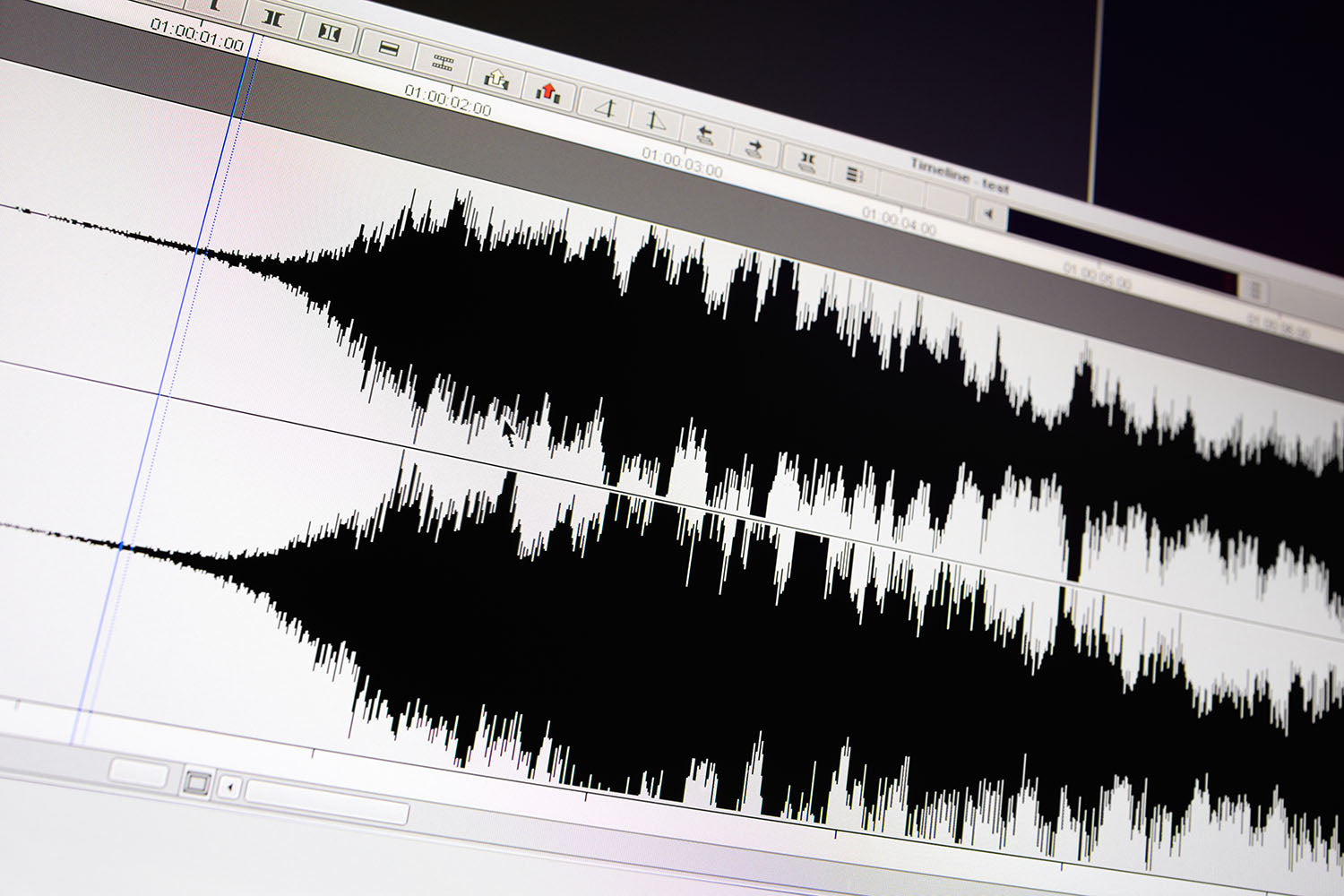
You probably now understand the basics behind creating textures with haptic actuators. If our skin mechanoreceptors can translate vibration and textures into waveform patterns, this also theoretically means we can register those patterns and make them play through a haptic actuator!
If we can measure the waveform, the acceleration, the frequency and the timing of the tactile effect of sensing a texture, this mean we can synthesize the data digitally and recreate the same texture with a haptic actuator, given this actuator has the necessary bandwidth to achieve the same waveform.
How Haptic Textures Will Shape Future Applications

Haptic Textures will lead to many revolutions in different industries. Feeling texture on an electronic device will certainly be part of every digital marketer toolset in the future. Being able to transfer highly detailed touch information to a potential customer online will have a major impact on online sales. You could feel the product remotely before buying it!
Feeling textures will also shape how Augmented Reality (AR) and Virtual Reality (VR) technologies will evolve. Imagine how immersive games could be using haptic textures! It could also be helpful in industrial applications related to the Tactile Internet. The best example would be for remote surgery, where the user needs to feel what he touches in order to be highly efficient.
Haptic Textures Need Actuators With Wide Bandwidth and Fast Rise Time
Since each texture has its own waveform and precise timing, the haptic actuator you use will have a major impact on the quality of the tactile effect. Your actuator needs to be able to create high-definition tactile effects otherwise, the user experience will not be good.
Eccentric rotating mass motors and linear resonant actuators simply can’t achieve the performance levels required to recreate textures. They have limited bandwidth, meaning they can’t achieve good levels of acceleration in a wide frequency range, and their long rise time makes it impossible to follow the precise timing required to create a crisp and convincing tactile effect.
Therefore, piezoelectric actuators are very interesting for more advanced haptic features. They offer the required performance levels to recreate textures on the devices that we use every day, like smartphones and tablets. They reach high acceleration, they can operate in wide frequency bandwidth, they have almost instantaneous rise/fall times and they can have custom sizes and shapes for different applications.
Piezo Has a Bad Reputation for Being Power Hungry, But It Isn’t True Anymore.
The problem with piezo actuators was that they require high voltage in order to operate. Since batteries used in mobile devices are normally in the range of 3 to 5.5 volts, you require a piezo driver to amplify the tension. Piezo drivers are known to be power-hungry, but this isn’t the case anymore, thanks to our CapDriveTM technology.
Our new piezo driver architecture reduces the power consumption by an order of magnitude and makes piezo haptics the most power-efficient solution available, even when you compare them to LRA and ERM. You can learn more about our CapDriveTM technology here.
[1] Home Science Tools - https://learning-center.homesciencetools.com/article/skin-touch/
Leave a comment